By Michael Worry | Aug 27, 2015
Nuvation Engineering is building an autonomous beer serving kegerator robot, because we like having great conversations at parties without the constant interruption of going to get a refill. When this after-hours engineering design project is complete, you will be able to wave “Keggy” over and pour yourself a beer from your choice from two on-board half-kegs.
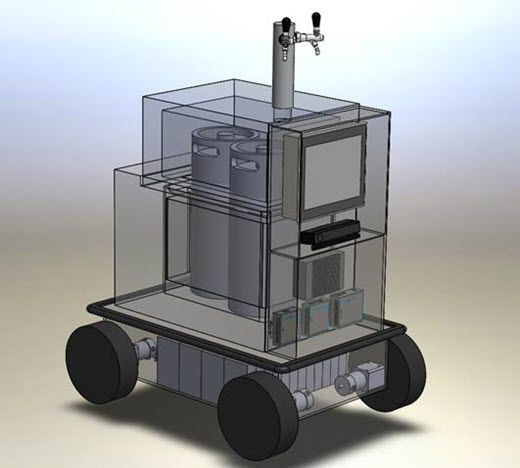
Note Nuvation's BMS prominently displayed on the front, just underneath the Microsoft Xbox Kinect One and LCD screen. We’ll have two 5G tanks of beer on board. 6kwhr battery. 12HP of motors. The battery is over-sized for the application – 6kwhr is a quarter of a Nissan Leaf battery and will drive a car 70 miles with the A/C on.
Some time after we had drawn the design on a napkin and ordered the first round of parts, our marketing department asked us to find some business-related reasons for building it, so we made some up:
- It will demonstrate our Battery Management System (BMS).
- It’s got some of Nuvation’s autonomous vehicle IP in it, which we ported over from Discofish, and recently integrated into a Peterbilt tractor.
- It’s our fourth robot and second fully electric vehicle after eRex.
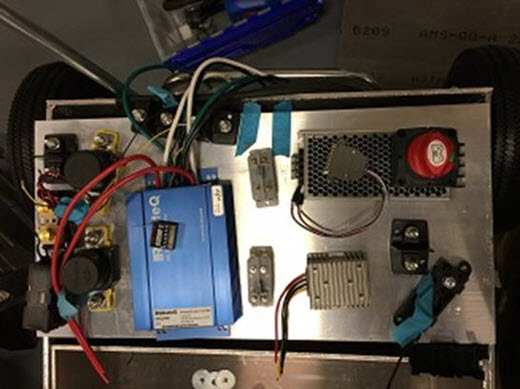
Here is sneak peek at where we’re at so far:

The base is all beefy ¼” 7075 aircraft aluminum, Whyachi gear boxes with ¾” titanium shafts, Ampflow neodymium motors, solid no-flat tires, RobotEQ 300A motor controller, Spektrum 2.4GHz spread spectrum failsafe RC gear, LiFe cells – all the stuff we learned in combat that has robots just work. The Kinect will have gesture recognition.
We did our first drive test successfully Sunday July 26. It was pretty cool – we hooked up the motors, gearboxes, wheels, motor controller, receiver, transmitter and a placeholder lead acid 12V battery and it all just worked. Let’s hear it for first-time right design principles!
The Kinect will have gesture recognition. Eventually you’ll be able to wave it over to serve a beer. We are working on RFID integration so that we can comply with age verification requirements. The rear is a DC cooler that a couple of our engineers researched.

Draft electrical schematic. We decided to feed the estop into the BMS Interlock to highlight that feature. We’ll use all four Power Interface contactor outputs: motor controller, charger/inverter, cooler and Otto (Nuvation Auto-Pilot) with screen. Otto will use Garmin GPS, Kinect and an Atmel digital compass.
Overall, a new platform highlighting Nuvation’s BMS and autopilot that can autonomously serve you a beer! ?


